Der erste Meilenstein, der besonders erwähnenswert ist, ist die DARPA (Defense Advanced Research Projects Agency) Grand Challenge. Es handelt sich dabei um einen vom US-Verteidigungsministerium gesponserten Wettbewerb. Das Ziel des Wettbewerbs war es, die Entwicklung eines vollkommen autonomen Landfahrzeuges zu fördern. Insgesamt gab es drei solcher Wettbewerbe.
- Anzeige -
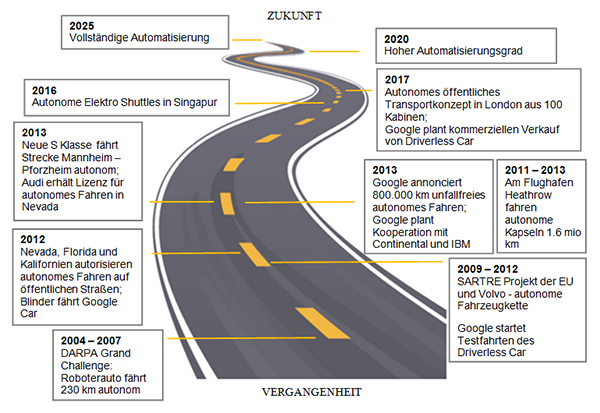
DARPA Grand Challenge und Urban Challenge 2004-2007
Der erste Wettlauf fand im Jahre 2004 statt, in dem sich das Preisgeld für das Fahrzeug, das als erstes einen 142 Meilen Parcours innerhalb von 10 Stunden durch die Mojave-Wüste absolvierte, auf eine Million US Dollar belief. Die genaue Route des Wettrennens wurde vor den Teams bis zwei Stunden vor Beginn geheim gehalten. Tatsächlich gelang es in diesem Jahr keinem der 107 Teams den Anforderungen gerecht zu werden.

Der Wettbewerb wurde ein Jahr später mit einem erhöhten Preisgeld von 2 Millionen USD wiederholt. Dieses Mal schafften es 5 Teams ins Ziel, wobei das Stanford Fahrzeug „Stanley“ mit knappen 7 Stunden der klare Sieger wurde. Der Roboter Stanley basiert auf einem VW Touareg, ausgestattet mit einem Intel Computer und vielen Sensoren, die die Haupttechnologie des autonomen Fahrens darstellen.
Der letzte Wettlauf, die DARPA Urban Challenge, fand 2007 statt. Das Preisgeld wurde auf insgesamt 3,5 Millionen USD erhöht, doch auch die Anforderungen an das autonome Fahrzeug stiegen. Zum ersten Mal wurde das Fahren in einer städtischen Umgebung auf Straßen mit Gegenverkehr erprobt. Dabei mussten die Fahrzeuge schon vor dem Finale beweisen, dass sie sowohl autonom ein- und ausparken, als auch Hindernisse umfahren können. Auch das korrekte Verhalten an Straßenkreuzungen musste unter Beweis gestellt werden.

Ein deutsches Team der Universität Braunschweig schaffte es mit dem autonom fahrenden VW Passat „Caroline“ ins Finale, schied aber während des Rennens aus. Gewinner der Urban DARPA Challenge wurde das Tartan Racing Team aus Pittsburgh.
Hintergrund der DARPA Challenge war es zu beweisen, dass autonomes Fahren im städtischen sowie ländlichen Bereich prinzipiell möglich sei. Diese Mission kann man durch die Resultate der Grand und der Urban Challenge als geglückt betrachten. Dennoch fehlte bis dato noch der Beweis, dass autonome Fahrzeuge auch in (Gefahren-)Situationen mit Fußgängern, Fahrrädern, sowie statischen und dynamischen Verkehrszeichen sicher für Fahrer und Umwelt sind.
SARTRE „Safe Road Trains for the Environment“ 2009-2012
Im Jahr 2009 startete die EU in Kooperation mit sieben europäischen Partnern, unter anderem der Fahrzeughersteller Volvo, ein Projekt namens SARTRE (Safe Roads Trains for the Environment). Das Projekt wurde 2012 finalisiert. Der Kerngedanke des Projektes war es, dass sich ein Fahrer mit seinem Fahrzeug auf einer Autobahn einer autonomen Fahrzeugkette anschließen kann. Diese Kette wird von einem Führer-Fahrzeug geleitet, das manuell gefahren wird. Das eigene Fahrzeug kommuniziert mit den anderen Fahrzeugen und folgt der Kette autonom.
Die Idee ist also, dass man seinen eigenen Pkw für Reisen verwenden kann. Das Steuern wird aber dem Führer-Fahrzeug bzw. der autonomen Technologie überlassen, sodass der eigene Pkw völlig autonom und sicher der Kette folgt. Neben dem Effekt, sich nicht auf den Verkehr konzentrieren zu müssen, wird durch diese Art von Transport eine Kraftstoffeinsparung von 10-20 % geschätzt.

Das Verkehrssystem wurde größtenteils auf Teststrecken erprobt, aber auch auf öffentlichen Straßen in Spanien. Das Projekt bietet so ein Szenario der Zukunft in der autonomes Fahren mit manueller Leitung kombiniert werden kann. Außerdem sind die technologischen Anforderungen an die Fahrzeuge innerhalb der Kette niedriger als die an das Leit-Fahrzeug. Dadurch kann das Auto innerhalb der Kette von der Technologie des führenden Fahrzeuges profitieren, ist aber in der Anschaffung relativ kostengünstig.
Google Driverless Car 2009-2014
Im Jahr 2009 begann das Unternehmen Google die Arbeit am Projekt eines autonomen Fahrzeuges. Zur Hilfe nahm es sich Ingenieure des Gewinner Teams Standford der DARPA Grand Challenge und CMU der Urban Challenge. Bereits 2010 fuhr das Google Driverless Car autonom auf Teststrecken. Es ist ein Toyota Prius, ausgestattet mit Sensoren, GPS, Kamera und einem Fahrer, der im Notfall das Lenkrad übernehmen kann. Eines der Testfahrzeuge fuhr die wohl kurvigste und steilste Straße in den USA entlang, die Lombard Straße in San Francisco.
Im Jahr 2011 begann Google die Lobbyarbeit zur Gesetzesänderung im Staat Nevada. Ziel war die Autorisierung autonomen Fahrens auf öffentlichen Straßen. Googles Lobbyarbeit erweist sich als erfolgsversprechend. Anfang 2012 wird Nevada der erste Staat, dessen Judikative das Fahren autonomer Fahrzeuge im öffentlichen Straßenverkehr autorisiert. Inzwischen haben auch die Staaten Florida, Kalifornien und der Distrikt Kolumbien ein dementsprechendes Gesetz verabschiedet.

Im August 2012 gab Google öffentlich bekannt, dass ihre „Driverless Cars“ einen neuen Meilenstein erreicht hätten, indem sie 300.000 Meilen autonom und unfallfrei hinter sich gelegt hätten. Im gleichen Zeitraum stellt Google einem Blinden ihr „Driverless Car“ zur Verfügung. Diese großzügige Geste kann auch als cleverer Schachzug verstanden werden. Denn laut kalifornischem Gesetz ist das autonome Fahren nur unter Anwesenheit eines Fahrers erlaubt. Diese Prämisse ist durch das Fahren eines Blinden erfüllt.
Kurz danach wird bekannt, dass Google im Hinblick auf ein autonomes Fahrzeug eine Zusammenarbeit mit dem deutschen Autozulieferer Continental und IBM plant. IBM soll dabei die Rechner zur Verfügung stellen, die notwendig sind, um die umfassenden Datenmengen, die zwischen den Autos ausgetauscht werden, empfangen und verarbeiten zu können.
Im Jahr 2013 knackte Google den 500.000 Meilen Rekord des autonomen Fahrens im kalifornischen Straßenverkehr. Der Konzern sieht sich als Pionier im Geschäftsfeld des autonomen Fahrzeuges. Laut Aussage von Sergey Bin, einem der Google Gründer, sollen selbstfahrende Autos für den kommerziellen Kauf bereits im Jahr 2017 erhältlich sein.
Hintergrund: Dieser Artikel basiert auf einer Studienarbeit aus dem Jahr 2014 mit dem Titel „Autoindustrie – Die Mobilität von Übermorgen“, entstanden im Rahmen des Management-Seminar an der Hochschule Pforzheim.
- Anzeige -